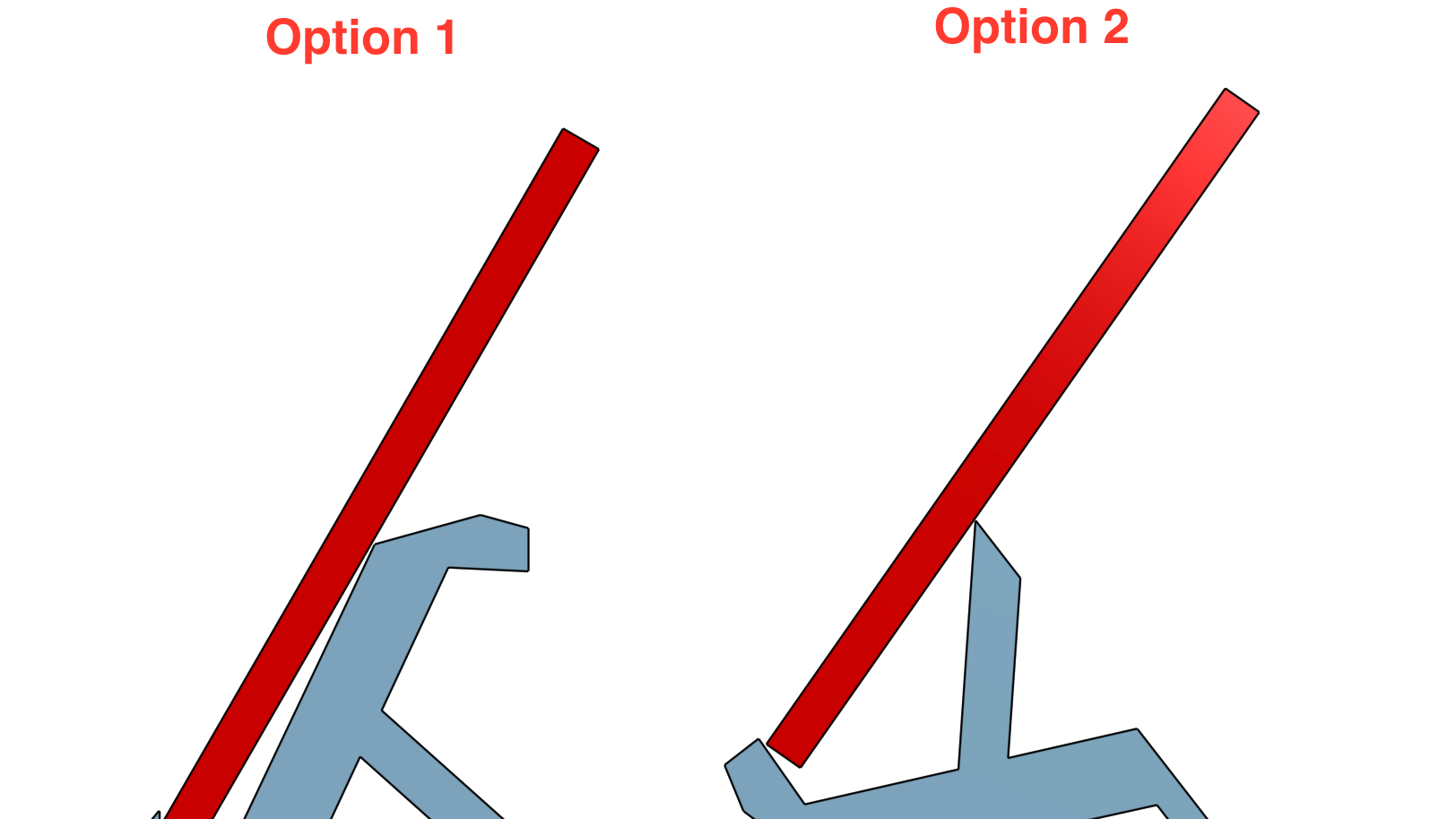
The objective of this project was to design a system to transport a 1 - foot long vertically standing prismatic bar across a variable distance, and return to the starting point without toppling.
COMPUTATIONAL SIMULATION
To determine the maximum speed and acceleration of the cart, without toppling the bar, we used kinematic equations to calculate the theoretical maximums, and simulated the motion using SolidWorks CAD software.
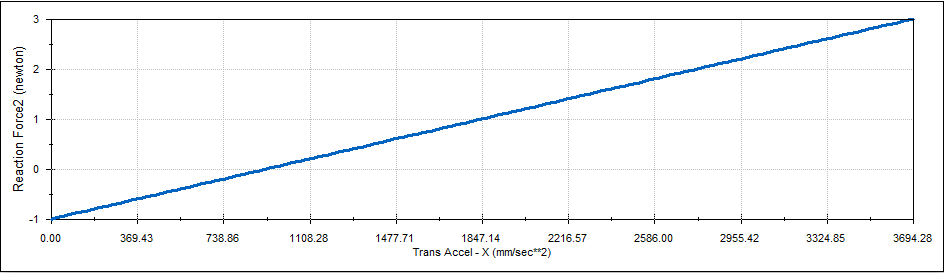
I used SolidWorks Motion Analysis to track the theoretical motion of the cart supporting the 1 foot beam in motion. The analysis produced a graph and series of data points to help determine the maximum acceleration before the beam topples.
As highlighted yellow in the table of data points and shown in the graph below, the acceleration value at which the Reaction Force of the beam is zero, is when the maximum acceleration is reached.
This value can be calculated using the linear interpolation equation:
y = y1 + (x - x1) ⨯ (y2 -y1) / (x2 - x1)
From this, we understand that the maximum acceleration is 817.22 mm/second^2, which is approximately equivalent to the theoretical calculated maximum acceleration of 32.2 in/second^2

MOTOR CONTROL
We developed code that controls the gear motor based on the feedback of the encoder. The code tracks the distance traveled, based on the circumference of the wheels of the cart, and adjusts the cart speed to accelerate until half way of the forward distance is traveled. Then, it is programmed to decelerate until it reaches the pivot point. Similar logic is applied to return the cart, after switching analog pins to account for the change in direction of the motor.
SPEED EXCERCISE